
Можно не сомневаться, что осваивать Солнечную систему и исследовать новые миры в основном будут автоматические системы и многочисленные роботы. Это заставляет создавать роботов как универсальные платформы с возможностью простой модификации, чтобы была возможность решать как можно более широкий круг задач. Для этого отдельные детали роботов и особенно конечности должны быть гибкими и по назначению, и по сути, а лучшей моделью для этого оказались земляные черви.

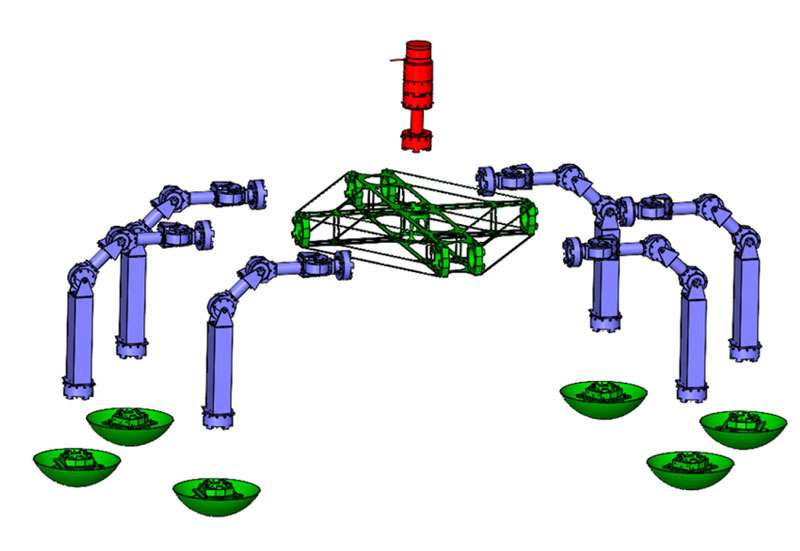
В процессе создания универсальной роботизированной платформы для космических программ группа исследователей из Массачусетского технологического института придумала концепцию модульного шагающего робота WORMS (Walking Oligomeric Robotic Mobility System), ноги которого имели бы подвижные сочленения подобно телу червей. Также благодаря продуманным креплениям с использованием штифтов ноги, а в более широком смысле конечности, могут быстро крепиться к шасси и так же просто сниматься и заменяться на другие функциональные элементы без использования специальных инструментов.
Как объясняют разработчики, сегодня это платформа для переноса тяжестей с одного места на другое, например, на Луне, а завтра робот с изменённой конфигурацией отправится бурить скважины в лавовые трубки. Для одной и другой задачи понадобятся одинаковые базовые элементы и немного различающийся набор конечностей. При этом возможность конструктора будет подкреплена гибкостью конечностей, сочленения и конструкцию которых совершенствуют в MIT.
Инженеры института создали и испытали два прототипа шасси WORMS, один из которых был способен перемещаться сам, транспортируя собственный немалый вес около 120 кг с помощью шести гибких ног, а второй мог нести полезную нагрузку до 400 кг. Прототипы были продемонстрированы на одной из тематических конференций IEEE, где разработчики показали возможность простой сборки и изменения в конфигурации робота буквально на коленке без применения специальных инструментов. Для отдалённых космических баз — это лучшее решение.





